近日,学院先进导航与智能感知课题组王迪副教授的研究论文“Iterated Extended Kalman Filter Based on Particle Swarm Optimization and Its Application to Underwater Robot Navigation”(基于粒子群优化的迭代扩展卡尔曼滤波及其在水下机器人导航中的应用)以长文(Full Paper)形式录用在控制领域顶刊《IEEE Transactions on Automation Science and Engineering》(IEEE TASE)上。该论文提出了一种新颖的水下机器人SINS/USBL组合定位方案用于复杂水下场景。伟德国际victor·1946源自王迪副教授为论文的第一作者,王俊玮老师为通信作者。伟德国际1946bv为论文的第一作者单位,湖南大学为合作单位,该研究得到了国家自然科学基金等项目的资助。论文研究了基于惯性导航系统/超短基线(SINS/USBL)的水下机器人导航的高精度与鲁棒性问题。基于Levenberg Marquardt与拉普拉斯原理提出迭代扩展卡尔曼滤波器(IEKF)以增强鲁棒性。针对系统噪声与测量噪声的强非线性问题,提出改进型粒子群优化(IPSO)算法。构建基于导航系统位置误差的均方误差适应度函数,提出改进型惯性权重计算方法以进一步提升IPSO算法适应性。最终基于斜距与方位信息,为所提IPSO-IEKF算法设计了SINS/USBL紧耦合模型。仿真与实验验证了所提算法的有效性。
论文主要贡献如下:
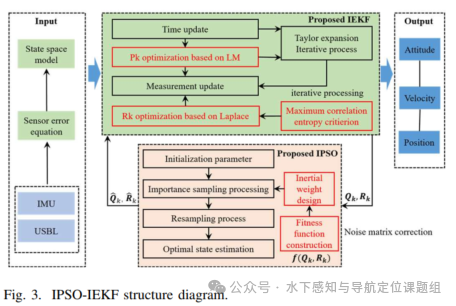
(1) 针对水下导航系统的非线性问题,本文提出一种迭代扩展卡尔曼滤波算法(IEKF)。一方面,基于迭代原理构建了IEKF算法,并基于LM算法优化IEKF状态向量的均方误差矩阵;另一方面,基于拉普拉斯原理重构IEKF的测量噪声方差矩阵。所提出的IEKF算法具有更强的鲁棒性。
(2) 针对复杂系统噪声与测量噪声引发的强非线性问题,在IEKF基础上引入粒子群优化算法。改进传统粒子群优化算法,构建基于导航系统位置误差的均方误差适应度函数。针对权重对粒子群搜索速度与收敛性的影响,提出改进型惯性权重计算方法,进一步提升粒子群算法的适应性。改进的粒子群优化算法可自适应估计IEKF算法的系统噪声方差矩阵与测量噪声方差矩阵;
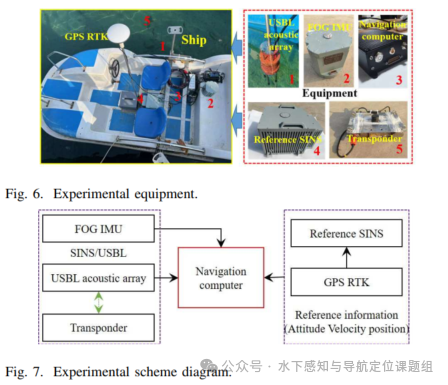
(3)为验证本文提出的IPSO-IEKF算法的有效性,将其应用于水下机器人导航。基于水下机器人常用的SINS/USBL导航系统,设计了导航算法流程。一方面,基于斜距与方位角信息提出紧凑型SINS/USBL模型,并将非线性模型应用于所提算法;另一方面,通过仿真与河道实验验证了该方法的有效性。